Real Time Digital Twin Platforms For Remote Excavation Infrastructure
Hitachi Construction Machinery initiates collaborative virtual reality demonstration tests to improve heavy equipment deployment metrics. www.hitachicm.com The operational parameters of contemporary infrastructure and earthmoving operations increasingly require centralized telemetry frameworks to balance site safety with raw material handling productivity. Conventional remote construction systems rely heavily on isolated, multi-angle camera streams that obligate human operators to visually estimate spatial boundaries, mechanical tracking deviations, and unpredictable grading fluctuations. To overcome these sensory constraints, heavy equipment engineering is shifting toward integrated digital twin architectures that recreate complete physical construction zones within a unified virtual model, establishing an immediate data loop for real-time remote machine operation. Virtual Spatial Modeling and Telemetry Integration Parameters Managing complex excavation activities amid ongoing vehicular and worker movements requires a unified data processing pipeline capable of aggregating high-density environmental telemetry. In a joint demonstration test scheduled to commence in June 2026 at a dedicated civil engineering deployment site in Tosa City, Kochi Prefecture, Japan, a high-fidelity geospatial tracking platform will manage the remote execution of standard extraction tasks. The engineering collaboration, conducted alongside regional construction entity Fukutome Development and specialized technology partners, relies on a 20-metric-ton class hardware unit designated as the ZX200A-7 hydraulic excavator. The primary software engine functions by sampling three-dimensional laser scanning data, machine tracking coordinates, worker locations, and vehicular movement paths across the active project field. By processing these heterogeneous data streams simultaneously, the system updates a real-time virtual representation of the changing terrain topography. This integrated user interface removes the requirement for peripheral telemetry screens, allowing off-site machine operators and remote terminal supervisors to evaluate blind spots and minimize component contact risks during continuous high-volume material handling loops. Cross Verification Execution and Remote Operation Analysis To establish baseline performance parameters for automated and remote operations, the civil infrastructure demonstration test enforces a strict comparative validation across multiple operating profiles: Direct Visual Remote Operations: Field technicians control the hydraulic excavator from a local station using direct line-of-sight viewing paths to evaluate situational response latencies. Camera Mediated Teleoperation: Operators execute standard grading commands solely through traditional streaming video feeds to track spatial estimation errors. Digital Twin Teleoperation: Drivers control the 20-ton class excavator using the integrated real-time 3D virtual model to verify cumulative efficiency enhancements. By tracking specific operational variables—including cycle times per bucket payload, structural vibration metrics, and operator fatigue limits—the trial identifies exact productivity changes across each deployment category. Furthermore, because the virtual spatial model presents a complete bird's-eye perspective of the entire construction site, project managers stationed at separate corporate offices can review immediate site conditions. This cross-location visualization capability facilitates rapid collaborative decision-making and remote engineering support, ensuring next-generation construction environments achieve a stable balance between human management and machine execution. Additional Context This section details technical specifications and competitive benchmarking not included in the original news release. Heavy equipment digital twin and remote teleoperation systems are evaluated using strict performance criteria defined by ISO 15143-3 Earth-moving machinery standards, focusing on data refresh frequencies, end-to-end signal latency, and spatial localization accuracy under severe weather degradation. Conventional remote equipment systems from competitors like Komatsu (utilizing the SmartConstruction platform) or Caterpillar's Cat Command system typically exhibit a satellite-to-machine processing latency window spanning 150 to 300 milliseconds over standard cellular links, which can restrict precision finishing tolerances to approximately plus or minus 100 millimeters. The Hitachi Construction Machinery digital twin platform alters this performance baseline by pairing real-time Edge-to-Cloud computing nodes with high-frequency Real-Time Kinematic Global Navigation Satellite System (RTK-GNSS) receivers mounted directly on the ZX200A-7 chassis. This electronic configuration samples machine pose variables and boom-arm position angles at a high frequency of 50 Hz, compressing total communication loop latency below 45 millis
 machineryasia
machineryasia 
Hitachi Construction Machinery initiates collaborative virtual reality demonstration tests to improve heavy equipment deployment metrics.
www.hitachicm.com
The operational parameters of contemporary infrastructure and earthmoving operations increasingly require centralized telemetry frameworks to balance site safety with raw material handling productivity. Conventional remote construction systems rely heavily on isolated, multi-angle camera streams that obligate human operators to visually estimate spatial boundaries, mechanical tracking deviations, and unpredictable grading fluctuations. To overcome these sensory constraints, heavy equipment engineering is shifting toward integrated digital twin architectures that recreate complete physical construction zones within a unified virtual model, establishing an immediate data loop for real-time remote machine operation.
Virtual Spatial Modeling and Telemetry Integration Parameters
Managing complex excavation activities amid ongoing vehicular and worker movements requires a unified data processing pipeline capable of aggregating high-density environmental telemetry. In a joint demonstration test scheduled to commence in June 2026 at a dedicated civil engineering deployment site in Tosa City, Kochi Prefecture, Japan, a high-fidelity geospatial tracking platform will manage the remote execution of standard extraction tasks. The engineering collaboration, conducted alongside regional construction entity Fukutome Development and specialized technology partners, relies on a 20-metric-ton class hardware unit designated as the ZX200A-7 hydraulic excavator.
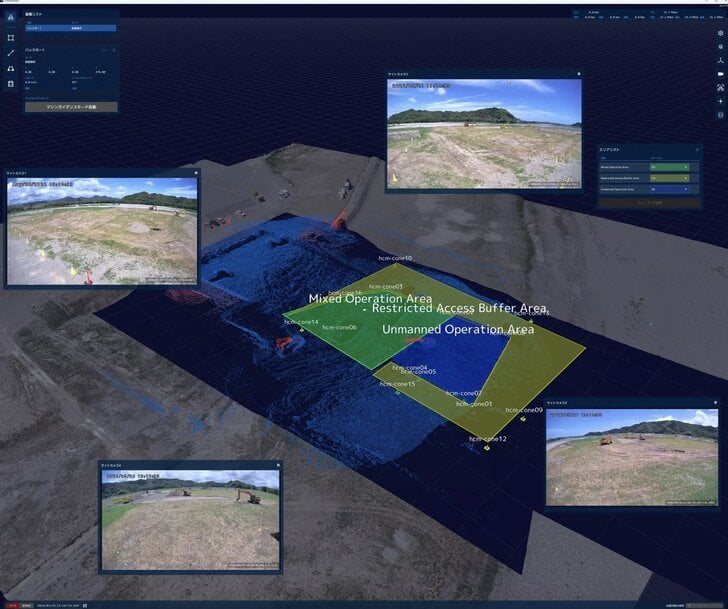
The primary software engine functions by sampling three-dimensional laser scanning data, machine tracking coordinates, worker locations, and vehicular movement paths across the active project field. By processing these heterogeneous data streams simultaneously, the system updates a real-time virtual representation of the changing terrain topography. This integrated user interface removes the requirement for peripheral telemetry screens, allowing off-site machine operators and remote terminal supervisors to evaluate blind spots and minimize component contact risks during continuous high-volume material handling loops.
Cross Verification Execution and Remote Operation Analysis
To establish baseline performance parameters for automated and remote operations, the civil infrastructure demonstration test enforces a strict comparative validation across multiple operating profiles:
- Direct Visual Remote Operations: Field technicians control the hydraulic excavator from a local station using direct line-of-sight viewing paths to evaluate situational response latencies.
- Camera Mediated Teleoperation: Operators execute standard grading commands solely through traditional streaming video feeds to track spatial estimation errors.
- Digital Twin Teleoperation: Drivers control the 20-ton class excavator using the integrated real-time 3D virtual model to verify cumulative efficiency enhancements.
By tracking specific operational variables—including cycle times per bucket payload, structural vibration metrics, and operator fatigue limits—the trial identifies exact productivity changes across each deployment category. Furthermore, because the virtual spatial model presents a complete bird's-eye perspective of the entire construction site, project managers stationed at separate corporate offices can review immediate site conditions. This cross-location visualization capability facilitates rapid collaborative decision-making and remote engineering support, ensuring next-generation construction environments achieve a stable balance between human management and machine execution.

Additional Context
This section details technical specifications and competitive benchmarking not included in the original news release.
Heavy equipment digital twin and remote teleoperation systems are evaluated using strict performance criteria defined by ISO 15143-3 Earth-moving machinery standards, focusing on data refresh frequencies, end-to-end signal latency, and spatial localization accuracy under severe weather degradation. Conventional remote equipment systems from competitors like Komatsu (utilizing the SmartConstruction platform) or Caterpillar's Cat Command system typically exhibit a satellite-to-machine processing latency window spanning 150 to 300 milliseconds over standard cellular links, which can restrict precision finishing tolerances to approximately plus or minus 100 millimeters.
The Hitachi Construction Machinery digital twin platform alters this performance baseline by pairing real-time Edge-to-Cloud computing nodes with high-frequency Real-Time Kinematic Global Navigation Satellite System (RTK-GNSS) receivers mounted directly on the ZX200A-7 chassis. This electronic configuration samples machine pose variables and boom-arm position angles at a high frequency of 50 Hz, compressing total communication loop latency below 45 milliseconds when routed through dedicated local sub-6 GHz infrastructure. This rapid update frequency allows the virtual model to track physical tooth-tip bucket boundaries down to a tight spatial accuracy margin of plus or minus 20 millimeters.
A comparative look at alternative digital twin excavation architectures underscores the distinct technical approaches present in this sector:
Additional Context
This section details technical specifications and competitive benchmarking not included in the original news release.
Heavy equipment digital twin and remote teleoperation systems are evaluated using strict performance criteria defined by ISO 15143-3 Earth-moving machinery standards, focusing on data refresh frequencies, end-to-end signal latency, and spatial localization accuracy under severe weather degradation. Conventional remote equipment systems from competitors like Komatsu (utilizing the SmartConstruction platform) or Caterpillar's Cat Command system typically exhibit a satellite-to-machine processing latency window spanning 150 to 300 milliseconds over standard cellular links, which can restrict precision finishing tolerances to approximately plus or minus 100 millimeters.
The Hitachi Construction Machinery digital twin platform alters this performance baseline by pairing real-time Edge-to-Cloud computing nodes with high-frequency Real-Time Kinematic Global Navigation Satellite System (RTK-GNSS) receivers mounted directly on the ZX200A-7 chassis. This electronic configuration samples machine pose variables and boom-arm position angles at a high frequency of 50 Hz, compressing total communication loop latency below 45 milliseconds when routed through dedicated local sub-6 GHz infrastructure. This rapid update frequency allows the virtual model to track physical tooth-tip bucket boundaries down to a tight spatial accuracy margin of plus or minus 20 millimeters.
A comparative look at alternative digital twin excavation architectures underscores the distinct technical approaches present in this sector:
- Komatsu SmartConstruction Architecture: Komatsu’s platform provides excellent pre-construction 3D drone mapping and daily volumetric payload tracking. However, its baseline communication pipeline is structurally designed for asynchronous daily reporting updates, leaving it without the high-frequency continuous synchronization loops required to operate heavy hydraulic excavators remotely in active mixed-traffic zones.
- Built Robotics Exosystem: This platform converts standard excavators into fully autonomous trenching units using heavy-duty lidar and rugged enclosure frames. While it achieves excellent standalone excavation efficiency, its software architecture functions as a closed, single-vehicle automation loop that lacks a universal multi-device user interface to synthesize simultaneous inputs from human workers, auxiliary vehicles, and remote management offices into a singular digital twin environment.
By unifying remote control loops, construction management databases, and multi-sensor site situation monitoring onto a single user interface, the ZX200A-7 demonstration platform eliminates intermediate software conversion steps. This integrated design maintains high geometric accuracy across changing terrain profiles, setting an efficient technical benchmark for heavy industrial teleoperation networks.
Edited by Romila DSilva, Induportals Editor, with AI assistance.
Edited by Romila DSilva, Induportals Editor, with AI assistance.
Powered by
Induportals Media Publishing